steve_bank
Diabetic retinopathy and poor eyesight. Typos ...
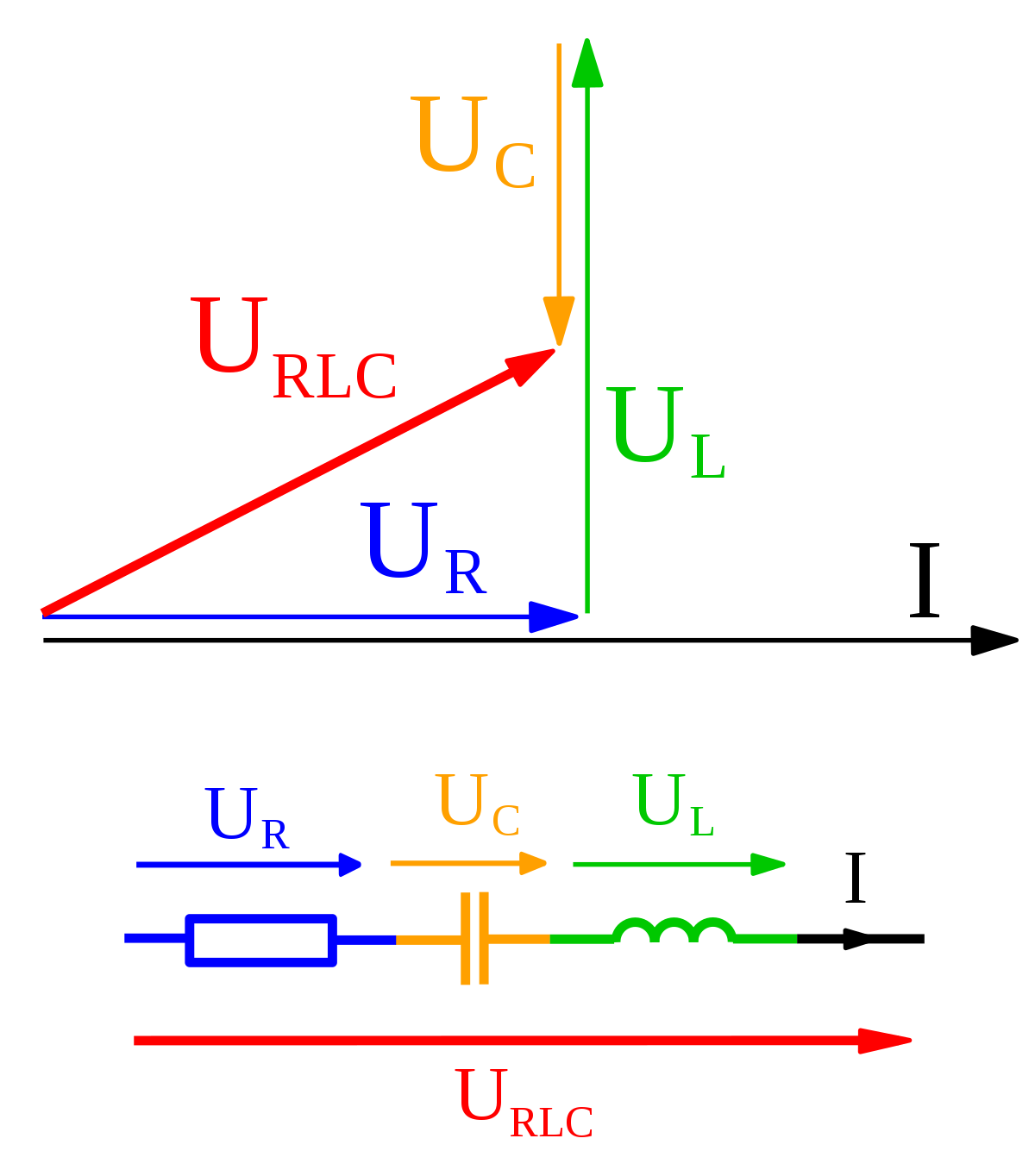
Complex numbers
Magnitude = sqrt(real^2 + imaginary^2).
Phase = atan(imaginary.real).
Magnitude = sqrt(real^2 + imaginary^2).
Phase = atan(imaginary.real).
Code:
import math
import cmath
R2D = 360/(math.pi*2) # radians to degrees
y = 0 + 1j
print('%.5f \t%.5f' %(abs(y),cmath.phase(y)*R2D))
y = 0 - 1j
print('%.5f \t%.5f' %(abs(y),cmath.phase(y)*R2D))
y = 1 + 1j
print('%.5f \t%.5f' %(abs(y),cmath.phase(y)*R2D))
y = 1 - 1j
print('%.5f \t%.5f' %(abs(y),cmath.phase(y)*R2D))
1.00000 90.00000
1.00000 -90.00000
1.41421 45.00000
1.41421 -45.00000
Arrays of complex numbers
n = 10
x = n*[0. + 0.j] # create complex array
ph = n*[0]
m = n*[0]
for i in range(n):
x[i] = i + 2*i*1j
m[i] = abs(x[i])
ph[i] = cmath.phase(x[i])*R2D
for i in range(n):
print('%10.5f \t%10.5fi \t%10.5f \t%10.5f ' %(x[i].real,x[i].imag,m[i],ph[i]))

")